最短路径算法
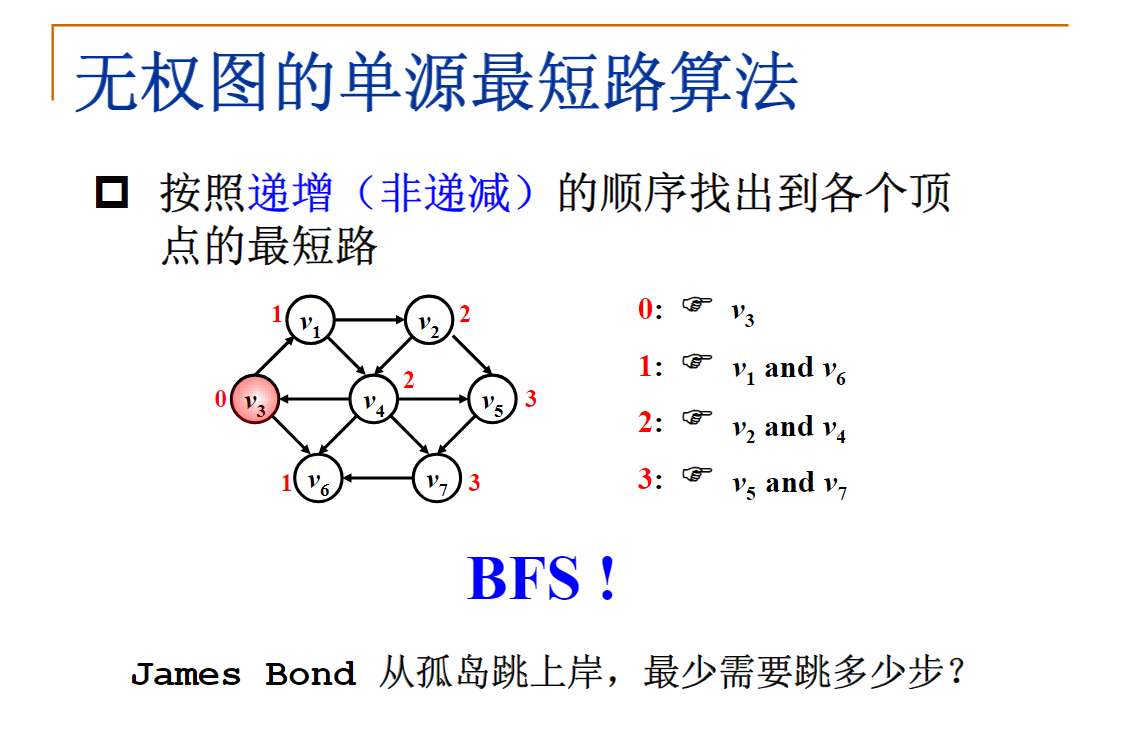
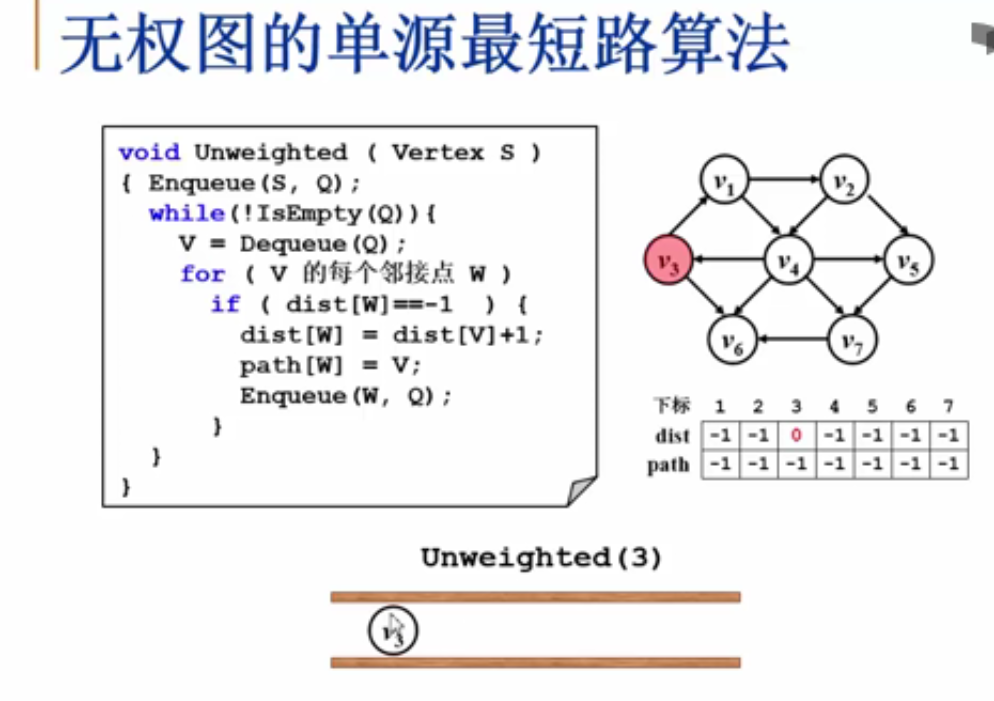
单源无权图最短路算法
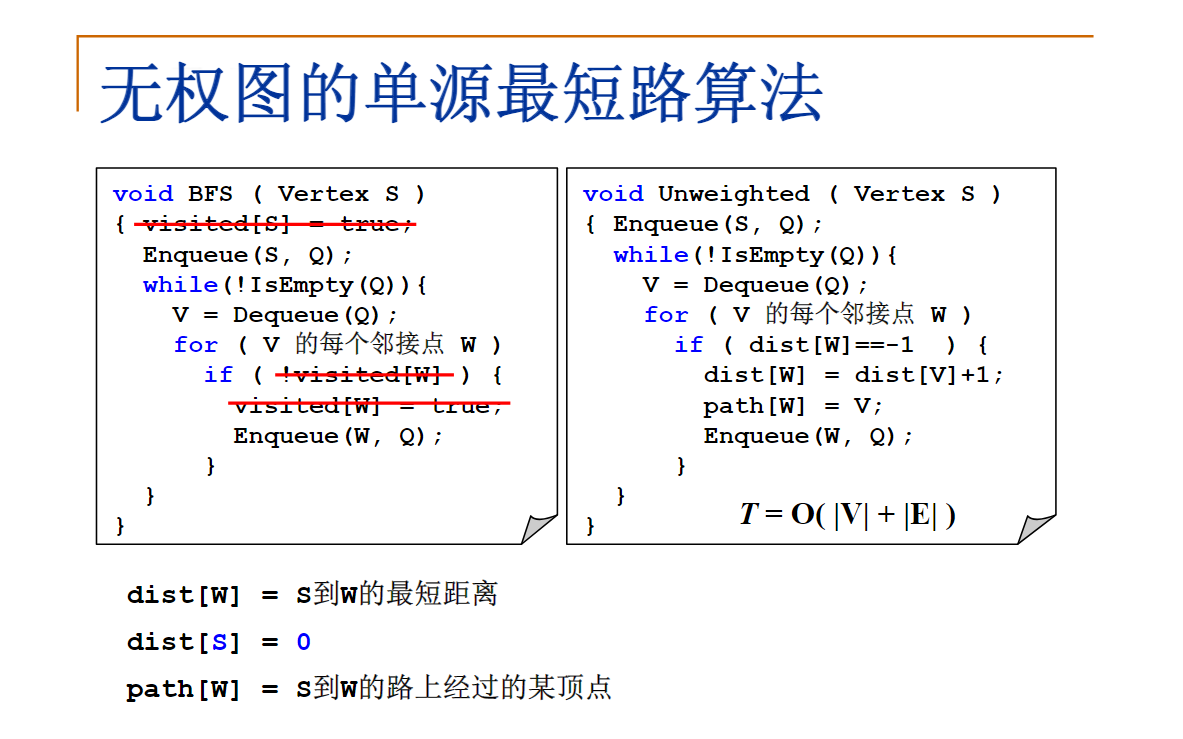
dist[W] = V 到 W 的最短距离;那么dist[W]应该被初始化为多少呢?D
- A.正无穷
- B.负无穷
- C.-1
- D.这三种都可以
随便一个不可能的数字即可表示没被访问,注意这里是无权图。
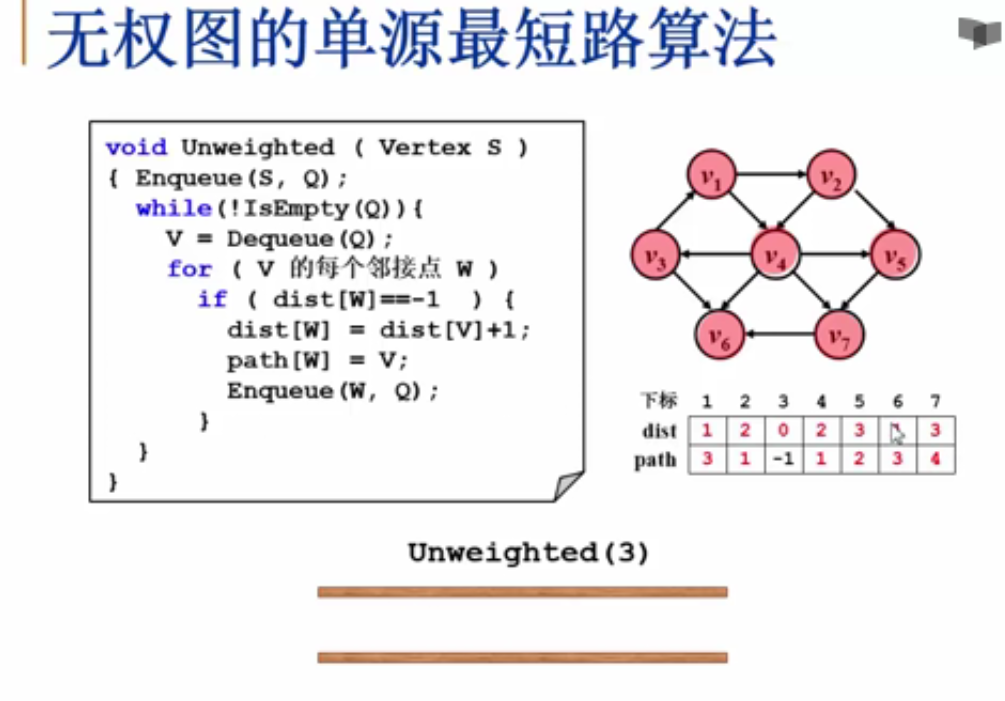
如果有|V|个顶点和|E|条边的图用邻接表存储,则算法的时间复杂度是多少?
void Unweighted ( Vertex S )
{
Enqueue(S, Q);
while(!IsEmpty(Q)){
V = Dequeue(Q);
for ( V 的每个邻接点 W )
if ( dist[W] == -1 ) {
dist[W] = dist[V]+1;
path[W] = V;
Enqueue(W, Q);
}
}
}
邻接表存储 - 无权图的单源最短路算法
/* 邻接表存储 - 无权图的单源最短路算法 */
/* dist[]和path[]全部初始化为-1 */
void Unweighted ( LGraph Graph, int dist[], int path[], Vertex S )
{
Queue Q;
Vertex V;
PtrToAdjVNode W;
Q = CreateQueue( Graph->Nv ); /* 创建空队列, MaxSize为外部定义的常数 */
dist[S] = 0; /* 初始化源点 */
AddQ (Q, S);
while( !IsEmpty(Q) ){
V = DeleteQ(Q);
for ( W=Graph->G[V].FirstEdge; W; W=W->Next ) /* 对V的每个邻接点W->AdjV */
if ( dist[W->AdjV]==-1 ) { /* 若W->AdjV未被访问过 */
dist[W->AdjV] = dist[V]+1; /* W->AdjV到S的距离更新 */
path[W->AdjV] = V; /* 将V记录在S到W->AdjV的路径上 */
AddQ(Q, W->AdjV);
}
} /* while结束*/
}
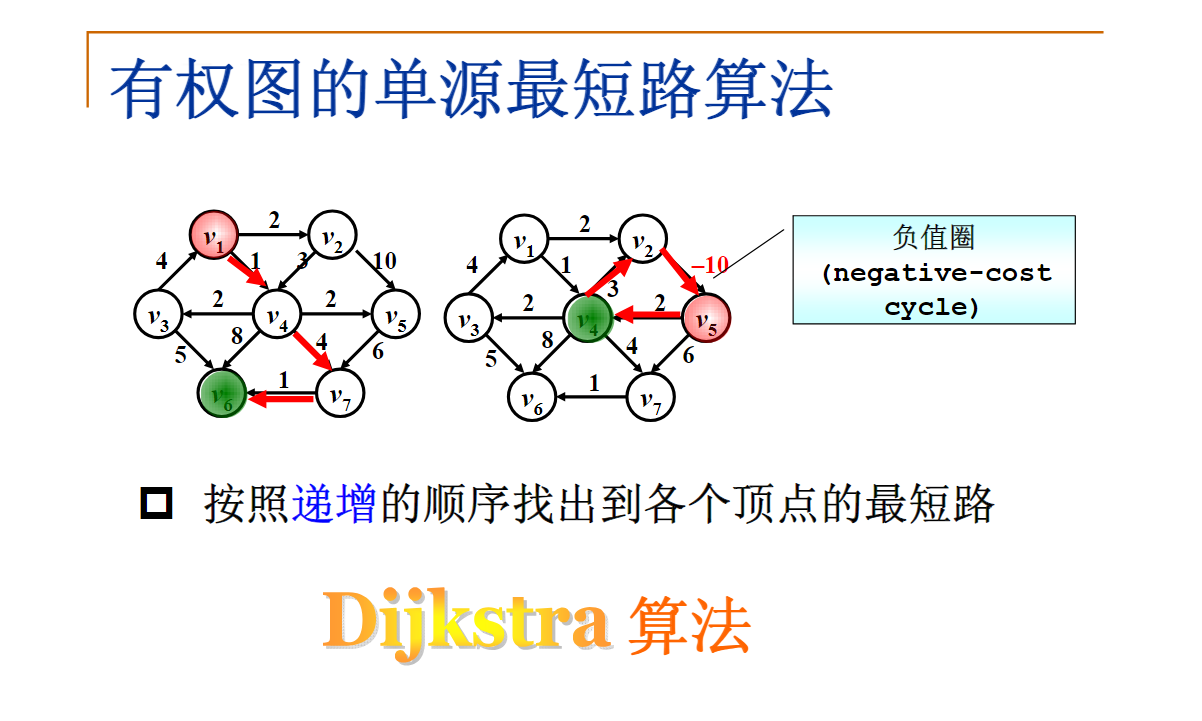
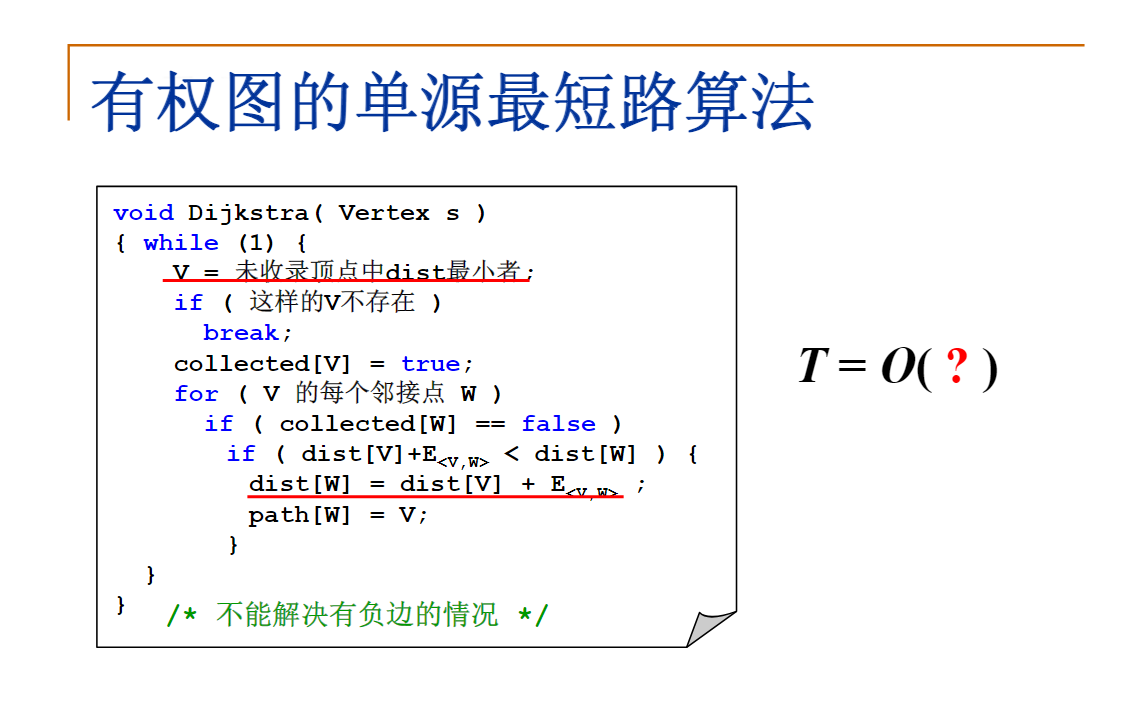
单源有权图最短路径算法——Dijkstra算法
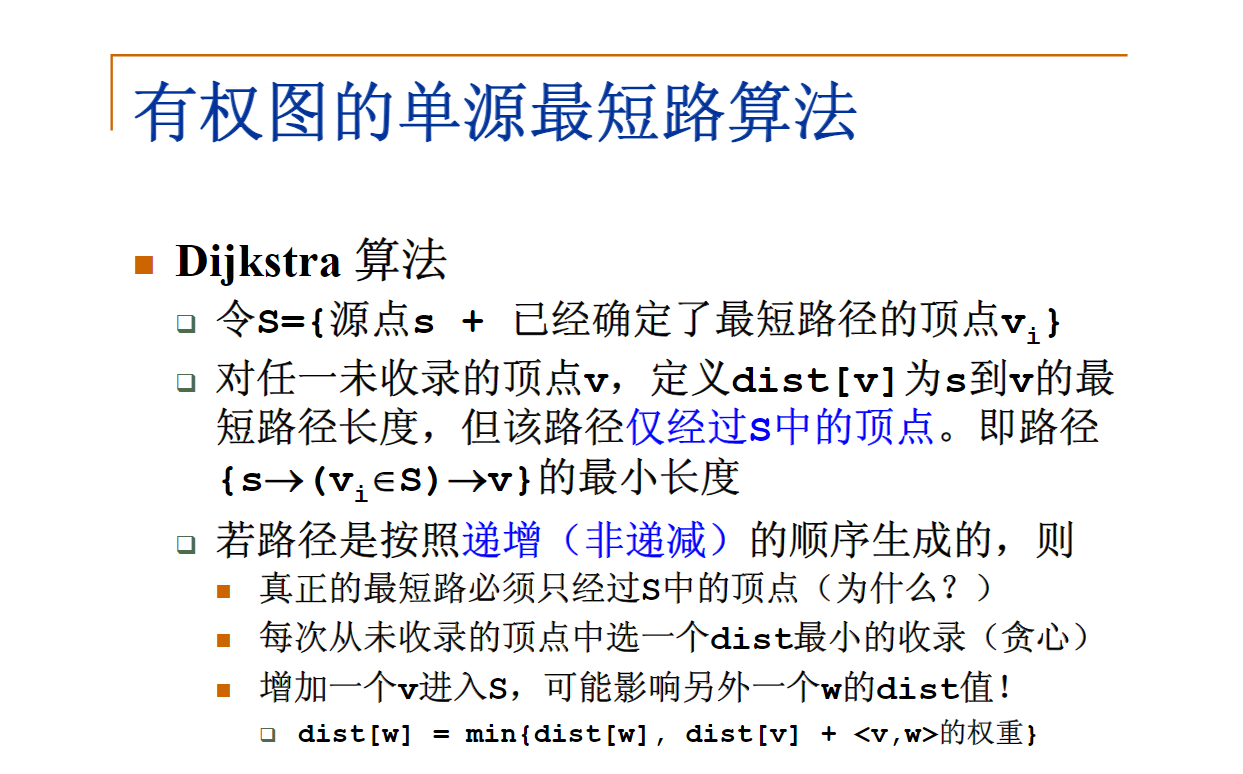
如果收录v使得s到w的路径变短,则:s到w的路径一定经过v,并且v到w有一条边
Dijkstra算法中的dist应该如何初始化?如果s到w有直接的边,则dist[w]=<s,w>的权重;否则dist[w]定义为A
- A.正无穷
- B.负无穷
- C. -1
- D.这三种都可以
注:这里是根据不等式结果更新dist数组的,不能随便初始化
void Dijkstra( Vertex s )
{ while (1) {
V = 未收录顶点中dist最小者;
if ( 这样的V不存在 )
break;
collected[V] = true;
for ( V 的每个邻接点 W )
if ( collected[W] == false )
if ( dist[V]+E<V,W> < dist[W] ) {
dist[W] = dist[V] + E<V,W> ;
path[W] = V;
}
}
}
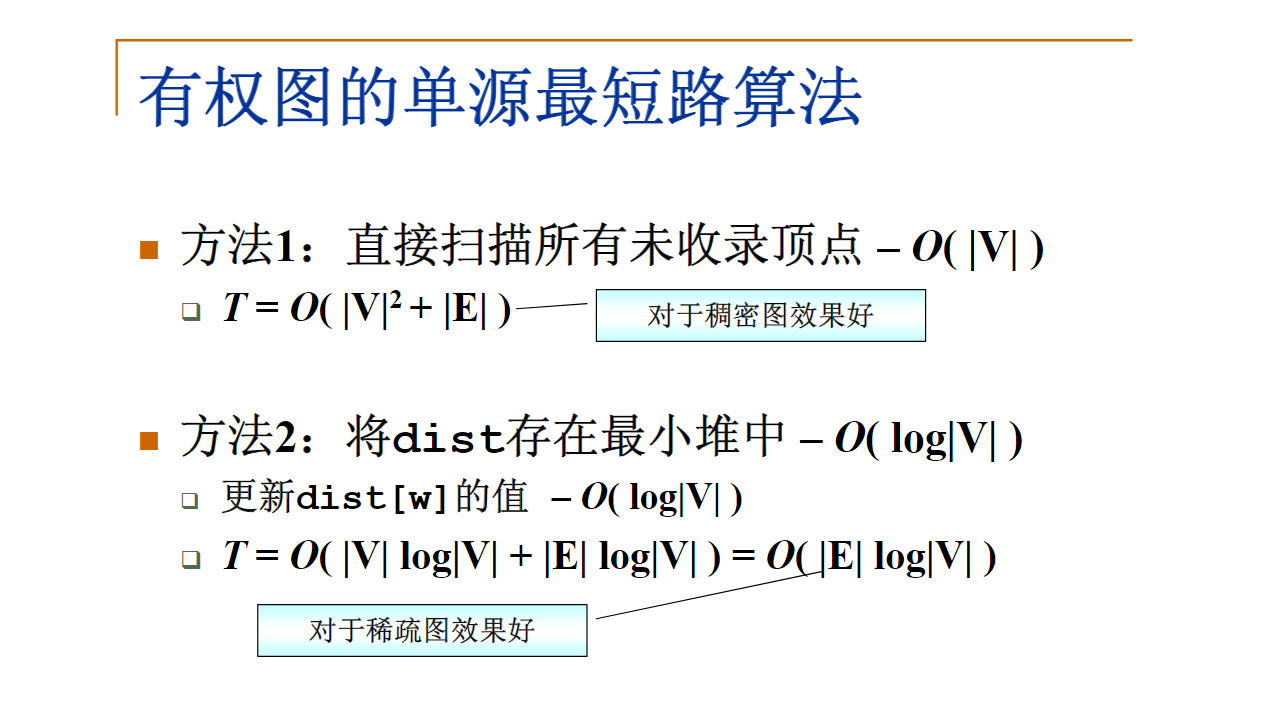
算法的时间复杂度是多少?
不好计算,取决于如何从未收录顶点中选出dist最小者
邻接矩阵存储 - 有权图的单源最短路算法
/* 邻接矩阵存储 - 有权图的单源最短路算法 */
Vertex FindMinDist( MGraph Graph, int dist[], int collected[] )
{ /* 返回未被收录顶点中dist最小者 */
Vertex MinV, V;
int MinDist = INFINITY;
for (V=0; V<Graph->Nv; V++) {
if ( collected[V]==false && dist[V]<MinDist) {
/* 若V未被收录,且dist[V]更小 */
MinDist = dist[V]; /* 更新最小距离 */
MinV = V; /* 更新对应顶点 */
}
}
if (MinDist < INFINITY) /* 若找到最小dist */
return MinV; /* 返回对应的顶点下标 */
else return ERROR; /* 若这样的顶点不存在,返回错误标记 */
}
bool Dijkstra( MGraph Graph, int dist[], int path[], Vertex S )
{
int collected[MaxVertexNum];
Vertex V, W;
/* 初始化:此处默认邻接矩阵中不存在的边用INFINITY表示 */
for ( V=0; V<Graph->Nv; V++ ) {
dist[V] = Graph->G[S][V];
if ( dist[V]<INFINITY )
path[V] = S;
else
path[V] = -1;
collected[V] = false;
}
/* 先将起点收入集合 */
dist[S] = 0;
collected[S] = true;
while (1) {
/* V = 未被收录顶点中dist最小者 */
V = FindMinDist( Graph, dist, collected );
if ( V==ERROR ) /* 若这样的V不存在 */
break; /* 算法结束 */
collected[V] = true; /* 收录V */
for( W=0; W<Graph->Nv; W++ ) /* 对图中的每个顶点W */
/* 若W是V的邻接点并且未被收录 */
if ( collected[W]==false && Graph->G[V][W]<INFINITY ) {
if ( Graph->G[V][W]<0 ) /* 若有负边 */
return false; /* 不能正确解决,返回错误标记 */
/* 若收录V使得dist[W]变小 */
if ( dist[V]+Graph->G[V][W] < dist[W] ) {
dist[W] = dist[V]+Graph->G[V][W]; /* 更新dist[W] */
path[W] = V; /* 更新S到W的路径 */
}
}
} /* while结束*/
return true; /* 算法执行完毕,返回正确标记 */
}
邻接矩阵存储 - 有权图的单源最短路算法实例
#include <stdio.h>
#include <stdlib.h>
#include <stdbool.h>
#define MaxVertexNum 100
#define INFINITY 65535
int visited[MaxVertexNum];
int dist[MaxVertexNum];
int path[MaxVertexNum];
typedef int Vertex;
typedef int WeightType;
typedef struct ENode *PtrToENode;
struct ENode
{
Vertex V1;
Vertex V2;
WeightType Weight;
};
typedef PtrToENode Edge;
typedef struct GNode *PtrToGNode;
struct GNode
{
int Nv;
int Ne;
WeightType G[MaxVertexNum][MaxVertexNum];
};
typedef PtrToGNode MGraph;
MGraph CreateGraph(int VertexNum)
{
MGraph Graph = (MGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
Vertex V1,V2;
for(Vertex V1=0; V1<Graph->Nv; V1++)
for(Vertex V2=0; V2<Graph->Nv; V2++)
Graph->G[V1][V2] = 0;
return Graph;
}
void InsertEdge(MGraph Graph, Edge E)
{
Graph->G[E->V1][E->V2] = E->Weight;
}
MGraph BuildGraph()
{
int Nv;
Edge E;
scanf("%d", &Nv);
MGraph Graph = CreateGraph(Nv);
scanf("%d", &(Graph->Ne));
if((Graph->Ne) != 0)
{
E = (Edge)malloc(sizeof(struct ENode));
for(int i=0; i<Graph->Ne; i++)
{
scanf("%d %d %d",&E->V1,&E->V2,&E->Weight);
InsertEdge(Graph, E);
}
}
return Graph;
}
void ResetVisited()
{
for(int i=0; i<MaxVertexNum; i++)
visited[i] = 0;
}
void Dijkstra(MGraph Graph, Vertex V)
{
ResetVisited();
for(int i=0; i<Graph->Nv; i++)
{
if(Graph->G[V][i]>0 && V!=i)
{
dist[i] = Graph->G[V][i];
path[i] = V;
}
else
{
dist[i] = INFINITY;
path[i] = -1;
}
}
dist[V] = 0;
path[V] = V;
visited[V] = 1;
for(int i=1; i<Graph->Nv; i++)
{
int minDist = INT_MAX;
int index;
for(int j=0; j<Graph->Nv; j++)
{
if(visited[j]==0 && dist[j]<minDist)
{
minDist = dist[j];
index = j;
}
}
visited[index] = 1;
for(int k=0; k<Graph->Nv; k++)
{
if(visited[k]==0 && Graph->G[index][k]>0 && minDist+Graph->G[index][k]<dist[k])
{
dist[k] = minDist+Graph->G[index][k];
path[k] = index;
}
}
}
}
void PrintPath(int path[], int distance)
{
int temp = distance;
int count = 1;
int collected[MaxVertexNum] = {0};
while(path[temp]!=0)
{
collected[count] = path[temp];
count++;
temp = path[temp];
}
collected[count] = path[temp];
while(count!=0)
{
printf("v%d->", collected[count]);
count--;
}
printf("v%d",distance);
}
int main()
{
MGraph Graph = BuildGraph();
Dijkstra(Graph, 0);
int distance = 5;
PrintPath(path, distance);
printf("\ncost distance :%d",dist[distance]);
return 0;
}
输入数据:
7 12
2 0 4
2 5 5
0 1 2
0 3 1
1 4 10
1 3 3
3 2 2
3 5 8
3 6 4
3 4 2
4 6 6
6 5 1
输出结果:
v0->v3->v6->v5
cost distance :6
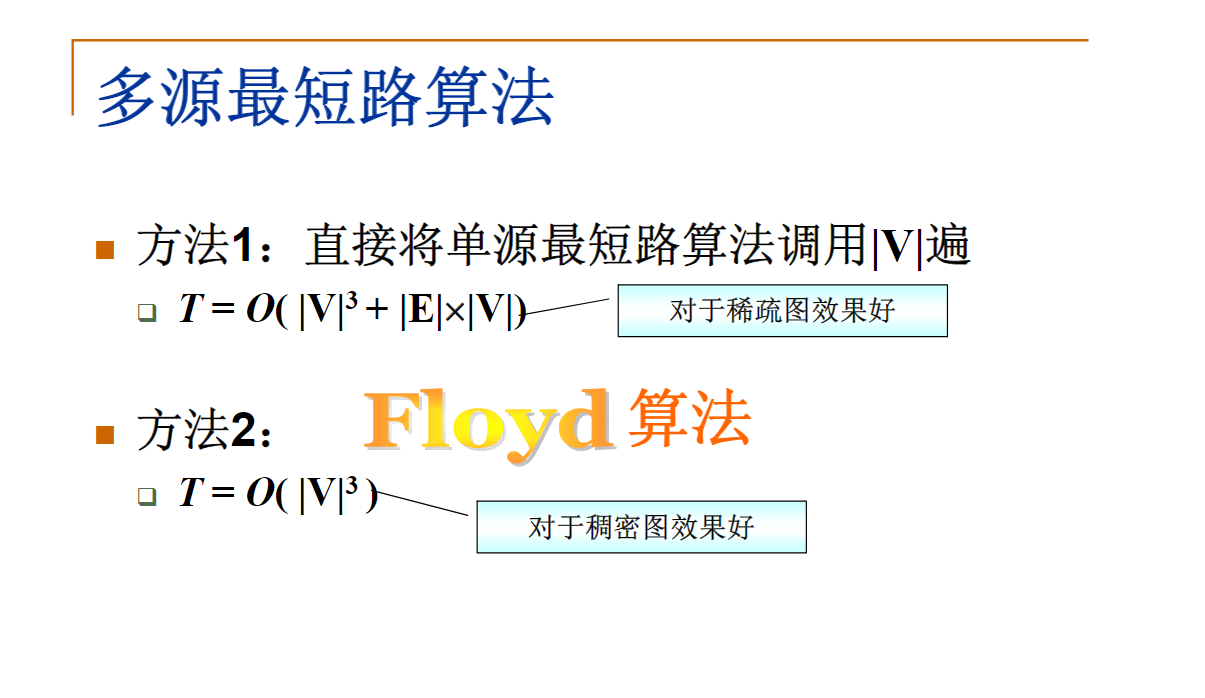
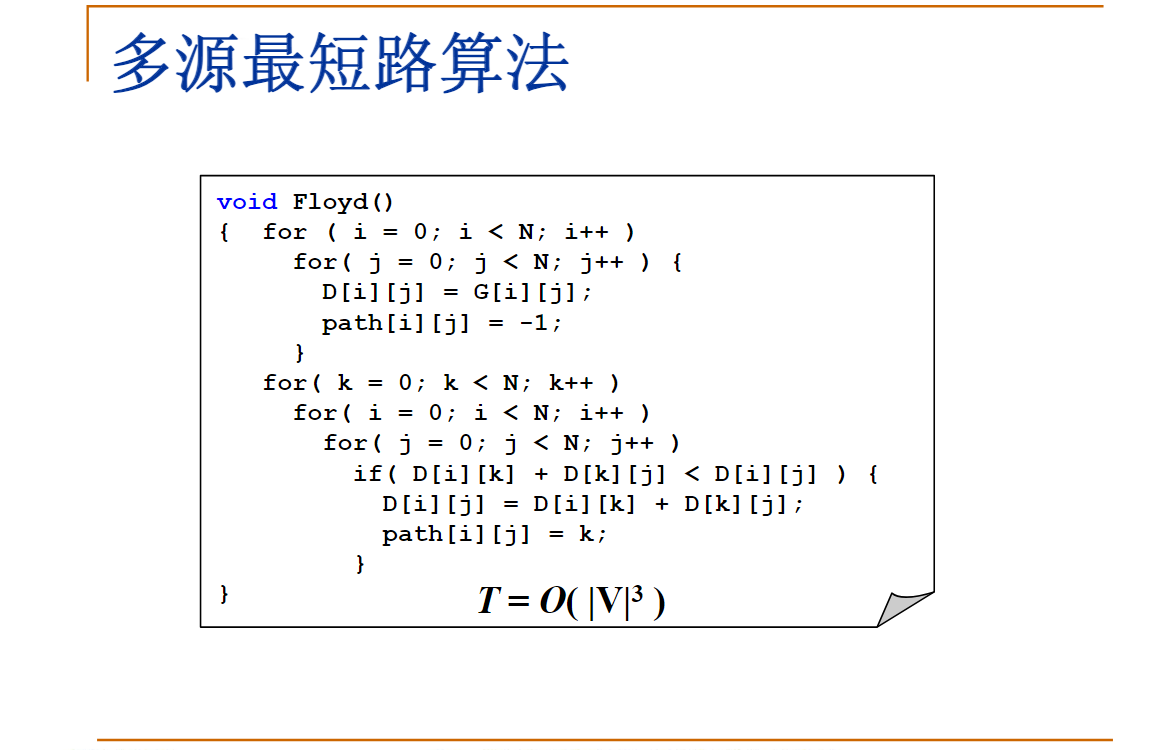
多源最短路算法——Floyd算法
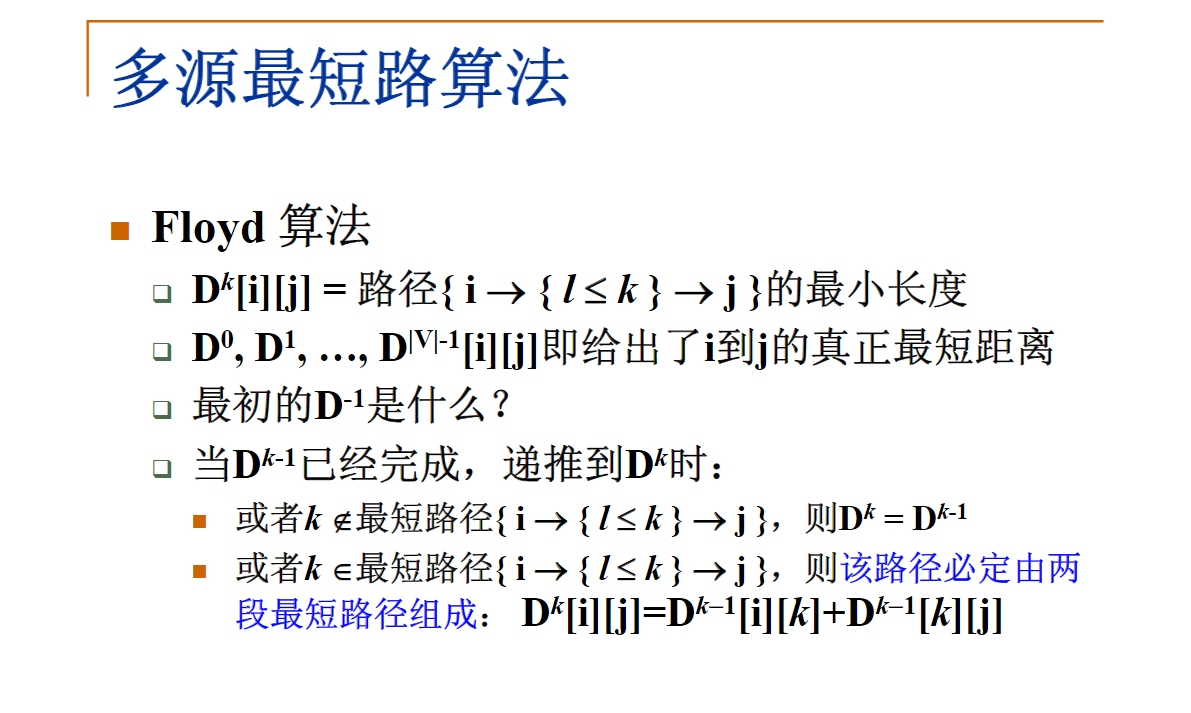
D矩阵应该初始化为什么?
- A.带权的邻接矩阵,对角元是0
- B.带权的邻接矩阵,对角元是无穷大
- C.全是0的矩阵
- D.全是无穷大的矩阵
正确答案:A你选对了
如果i和j之间没有直接的边,D[i][j]应该定义为什么?
- A.正无穷
- B.0
- C.负无穷
- D.这三种都可以
正确答案:A你选对了
邻接矩阵存储 - 多源最短路算法
/* 邻接矩阵存储 - 多源最短路算法 */
bool Floyd( MGraph Graph, WeightType D[][MaxVertexNum], Vertex path[][MaxVertexNum] )
{
Vertex i, j, k;
/* 初始化 */
for ( i=0; i<Graph->Nv; i++ )
for( j=0; j<Graph->Nv; j++ ) {
D[i][j] = Graph->G[i][j];
path[i][j] = -1;
}
for( k=0; k<Graph->Nv; k++ )
for( i=0; i<Graph->Nv; i++ )
for( j=0; j<Graph->Nv; j++ )
if( D[i][k] + D[k][j] < D[i][j] ) {
D[i][j] = D[i][k] + D[k][j];
if ( i==j && D[i][j]<0 ) /* 若发现负值圈 */
return false; /* 不能正确解决,返回错误标记 */
path[i][j] = k;
}
return true; /* 算法执行完毕,返回正确标记 */
}
分支限界法
https://blog.csdn.net/lcw_2015/article/details/52892501