基于OpenCV的自动对焦:多种图像清晰度评价算子的比较研究
概述
作者:Moukthika
发布日期:2025年3月11日
分类:计算机视觉、OpenCV
标签:自动对焦,Brenner梯度,熵测量,拉普拉斯算子,局部方差法,Sobel+方差,Tenengrad
Autofocus using OpenCV: A Comparative Study of Focus Measures for Sharpness Assessment
引言
自动对焦是成像系统中至关重要的环节,能够保证拍摄的图像和视频帧清晰锐利。在医学成像、安防监控、摄影等众多领域,通过从视频帧序列中选取最清晰的画面,极大提升图像的分析效果和呈现质量。
本文利用开源计算机视觉库OpenCV,对多种常用的图像焦点测量算子进行计算与比较。基于不同算子提取的图像清晰度指标,我们评估并选取视频中最清晰的帧,分析各算子在自动对焦任务中的性能优缺点及适用范围,为实际自动成像系统的设计提供参考。
环境及依赖
为了顺利复现本教程,您的系统需安装Python 3.x版本。
Jupyter Notebook用户
在代码单元内执行以下命令安装依赖库:1!pip install opencv-python numpy scikit-image或者
1%pip install opencv-python numpy scikit-imageVisual Studio Code及命令行用户
直接在终端输入:1pip install opencv-python numpy scikit-imageGoogle Colab用户
Google Colab环境已预装相关库,可直接运行代码。
数据集说明
实验所用视频包含多个含有不同清晰度的连续帧,既包括模糊帧,也有清晰帧。视频经过精心选择,确保焦点状态变化明显,便于对比各种清晰度评价算子的有效性。我们的核心目标是在此视频序列中,利用计算得分选出最锐利的画面。
常见焦点测量算子及计算原理
图像焦点测量算子通过分析图像的亮度变化、梯度强度及边缘细节,评估图像的清晰度。选择合适的算子直接关系到自动对焦系统和图像处理的准确性。本文实验以下六种典型算子:
- 局部方差法(Local Variance)
- 熵基法(Entropy-Based)
- Tenengrad(基于Sobel梯度)
- Brenner梯度法
- Sobel算子与方差结合法(Sobel + Variance)
- 拉普拉斯算子法(Laplacian-Based)
下面详细介绍各方法的原理、优缺点及适用场景。
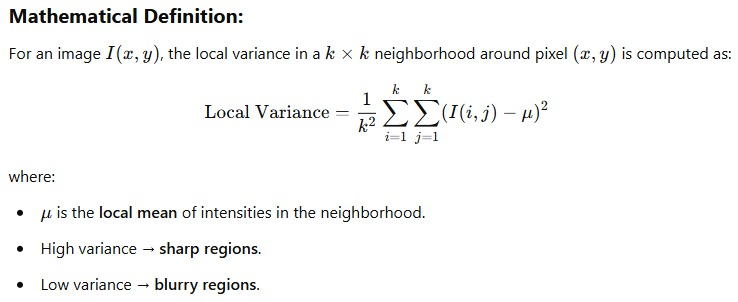
1. 局部方差法
原理:
测量图像局部区域内的像素强度方差,假设清晰图像在区域内存在更大强度变化,从而更具对比度。
优点:
- 计算简单、速度快
- 对高对比度图像敏感,易检测焦点
- 对部分随机噪声较不敏感
缺点:
- 对低对比度图像表现不佳,可能误判
- 光照不均匀时评估不准
- 鲜有应用于复杂自动对焦场景
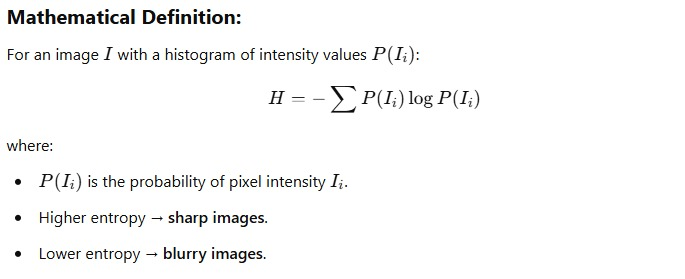
2. 熵基法
原理:
利用图像灰度级分布的熵值来衡量信息量,清晰图像由于细节丰富,通常熵值更高。
优点:
- 适合纹理丰富的图像
- 对少量噪声具有一定抵抗力
- 在低对比度情况下优于方差法
缺点:
- 计算量较大,速度较慢
- 高频噪声可能导致误判为清晰
- 对边缘主导的图像清晰度识别不够准确
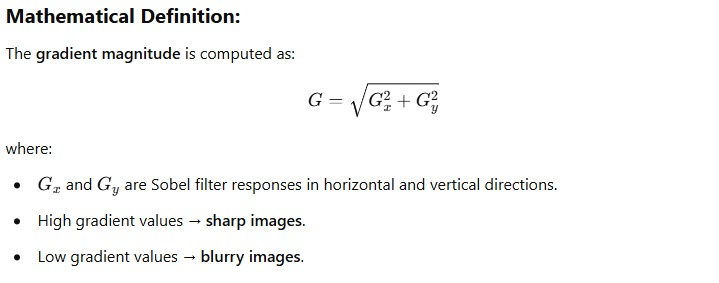
3. Tenengrad焦点测量(基于Sobel梯度)
原理:
通过Sobel算子计算图像水平方向和垂直方向的梯度强度,边缘强度越大,图像越清晰。
优点:
- 效果稳定,尤其擅长强边缘图像
- 对光照变化具有一定鲁棒性
- 被广泛用于自动对焦系统中
缺点:
- 对噪声敏感,噪声可能导致误判
- 纹理丰富而边缘弱的图像效果欠佳
- 方向敏感性可能影响测量准确性
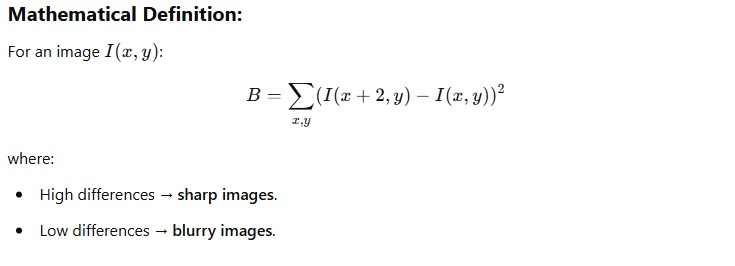
4. Brenner梯度法
原理:
计算相邻像素的强度差值,差异越大说明图像越清晰。
优点:
- 简单且计算速度极快
- 对边缘清晰度检测较有效
- 在模糊图像识别上表现优于方差法
缺点:
- 鲁棒性较差,低对比度图像表现欠佳
- 对噪声敏感,误判概率较高
- 适用范围有限,仅部分自动对焦场景有效
5. Sobel + 方差结合法
原理:
结合Sobel梯度和局部方差两种度量,同时考虑图像边缘强度和强度变化幅度,提高焦点测量的稳健性。

优点:
- 综合边缘和强度信息,效果更可靠
- 适应多种图像类型,包括纹理和边缘主导图像
- 减少噪声对结果的干扰
缺点:
- 计算复杂度较高,速度较慢
- 仍对极端噪声敏感
- 需要合理调整参数(如Sobel卷积核大小)以获得最佳效果
6. 拉普拉斯算子法
原理:
使用拉普拉斯二阶导数算子检测图像的高频细节,计算其响应方差,方差越大表示图像越清晰。

优点:
- 对细节和微弱边缘表现敏感
- 适合多种自动对焦和显微成像场景
- 光照变化对测量影响较小
缺点:
- 对噪声高度敏感,容易放大噪点
- 计算开销较大
- 边缘过度强调可能造成误判
常用聚焦度量函数实现
为了评估不同的聚焦度量方法,我们将每种方法应用于视频的每一帧,计算其聚焦得分,然后选择得分最高的最清晰帧。各方法的代码框架相同,仅替换聚焦度量函数。
主要流程包括:
- 逐帧读取视频。
- 用选定的聚焦度量函数计算聚焦得分。
- 记录帧和对应的得分,便于后续比较。
- 选择聚焦得分最高的帧作为“最清晰帧”。
- 打印最优帧编号及其得分。
- 显示最优帧,直观验证聚焦效果。
Python 示例代码(通用框架)
| |
1. 局部方差法(Local Variance)
| |
2. 基于熵的度量(Entropy)
| |
3. Tenengrad法(基于Sobel梯度)
| |
4. Brenner梯度法
| |
5. Sobel梯度与方差结合
| |
6. 拉普拉斯法(基于Laplacian算子)
| |
需要将 compute_focus_measure(image) 替换为以上相应的函数以测试不同方法。
总结
本文介绍的六种焦点测量算子各有特点:局部方差法适合速度优先和高对比图像,熵法适合纹理丰富或低对比度图像,而Tenengrad、Brenner、Sobel+方差和拉普拉斯方法则更适用于多样化的自动对焦任务,尤其是基于梯度的算子在准确性和鲁棒性方面表现突出。
实际应用中,选择合适的焦点算子应综合考虑图像特性、计算资源和噪声环境。未来结合深度学习等新兴技术,有望进一步提升自动对焦的实时性和准确率。