Docker是一个广泛使用的容器化平台,可用于部署和运行各种应用程序。使用Docker,我们可以轻松地将应用程序打包成容器并在任何环境中运行,从而实现更高效的开发和部署。
构建镜像的方式有两种:一种是基于容器制作,另一种就是通过Dockerfile。
Dockerfile是一个Docker镜像的描述文本文件,内部是一条条顺序执行的指令。
步骤1:创建Python Flask应用程序
我们将使用Python Flask框架创建一个简单的Web应用程序。首先,创建一个名为“app.py”的Python文件,并使用以下代码编写应用程序:
| |
requirements.txt文件中加入:
| |
启动这个应用后,默认通过http://127.0.0.1:5000/访问,也可以按需更改
这个应用程序只返回“Hello, World!”,但它足以演示如何将一个Python Flask应用程序打包成Docker容器。
步骤2:编写Dockerfile文件
接下来,我们将编写一个Dockerfile文件,用于将Python Flask应用程序打包成Docker容器。
在项目根目录下创建一个名为“Dockerfile”的文件(Dockerfile文件和app.py同目录),并添加如下内容:
| |
也可以配置所需环境变量,如下所示:
| |
Dockerfile 的设计思想,是使用一些标准的原语(即FROM/WORKDIR/…),描述我们所要构建的 Docker 镜像,并且这些原语,都是按顺序处理的。可以通过下面这个文件了解参数具体意义。
| |
- FROM:FROM 指令为后续的操作设置基础镜像(Base Image),一个有效的 Dockerfile 文件必须以 FROM 指令开始。指定了“python:3.6-slim”这个官方维护的基础镜像,在这个基础镜像中,已经安装好了python的语言环境等;
- WORKDIR:WORKDIR 指令为其后续的RUN/CMD等指令设置工作目录。在这里,将工作目录切换至
/app,也就是说,在这一句指令执行之后,Dockerfile 之后的操作都以该命令指定的目录(即/app)作为当前目录; - ADD src … dest:ADD 指令将
src目录下的文件或目录拷贝至镜像文件系统的dest路径下。在这里,就是将当前目录下的3个文件拷贝至/app目录下; - RUN:RUN 指令就是在容器里执行相应的shell命令。在这里,使用pip命令安装这个应用所需要的依赖;
- EXPOSE:对外暴露容器在运行时的监听端口,此外还可以指定是端口监听基于TCP还是UDP的,默认为TCP。在这里,表示允许外界访问容器的80端口。你也可以写成
EXPOSE 80/tcp; - ENV:设置环境变量;
- CMD:CMD指令的主要作用就是为容器设置默认行为。在这里表示的意思是 Dockerfile 指定 python app.py 为这个容器的进程。其中app.py 的实际路径是
/app/app.py。所以,CMD ["python", "app.py"]等价于docker run <image> python app.py。注意,一个Dockerfile文件中只能有一个CMD指令,如果出现多个,只有最后一个会起作用。
关于Dockerfile文件各个指令详细说明,参考Docker reference
步骤3:构建Docker镜像
接下来,我们将使用Dockerfile来构建Docker镜像。在项目根目录下打开终端,然后在服务器该项目目录下执行以下命令:
| |
该命令将使用当前目录中的Dockerfile文件,并为该文件创建一个名为“docker-test”的Docker镜像。请确保在命令的结尾包含一个点“.”,这表示使用当前目录作为构建上下文。其中-t 指定生成的镜像的名字及标签,可以只写名字。
当最后出现:
Successfully built 9034bvf978e5
Successfully tagged docker-test:v1
此时flask镜像就被成功创建。在镜像构建完成后,可以运行docker images来查看所有可用的Docker镜像。
步骤4:运行Docker容器
现在,我们已经成功地将Python Flask应用程序打包成了Docker容器。接下来,我们将运行该容器并测试Web应用程序是否能够正常工作。
在终端中执行以下命令,运行Docker容器:
| |
该命令将在本地计算机上运行一个名为“docker-test”的Docker容器,并将容器的端口映射到本地计算机的端口5000。
现在,在Web浏览器中输入http://localhost:5000,我们应该能够看到“Hello, World!”的消息。这表示我们已经成功地使用Docker发布了我们的第一个Web项目!
先运行docker ps命令查看容器id再运行docker logs id能查看对应容器的日志。
步骤5:上传镜像到DockerHub
如果现在想要把这个容器的镜像上传到 DockerHub 上分享给更多的人,我要怎么做呢?为了能够上传镜像,首先需要注册一个 Docker Hub 账号(如果还没有Docker Hub账号,先去官网申请),然后使用 docker login命令登录。
登录Docker Hub
| |
然后使用 docker tag 命令给容器镜像打标签
| |
在本地可以看到镜像已经发生了一些变化
| |
接下来,把这个镜像推到 Docker Hub上去。
| |
随后在个人主页上可以看到:
至此,已经成功把自己打包的镜像上传到Docker Hub上了,如果别人需要,可以通过docker pull kkbill/helloworld:v1.0 pull下来使用。
此外,还可以使用 docker commit 命令,把一个正在运行的容器,直接提交为一个镜像。在这里,我先进入容器中做了简单的修改(即添加了一个文件),随后再执行 docker commit 命令。
| |
如有必要,也可以再次把这个新的镜像push到Docker Hub上去。
关于 docker commit 这个命令,官方的描述是:Create a new image from a container’s changes。实际上就是在容器运行起来后,把最上层的“可读写层”,加上原先容器镜像的只读层,打包组成了一个新的镜像。不过下面这些只读层在宿主机上是共享的,不会占用额外的空间。
而由于使用了联合文件系统,在容器里对镜像 rootfs 所做的任何修改,都会被操作系统先复制到这个可读写层,然后再修改。这就是所谓的Copy-on-Write。而Init 层的存在,就是为了避免执行 docker commit 时,把 Docker 自己对 /etc/hosts 等文件做的修改,也一起提交掉。
另外,在企业内部,能不能也搭建一个跟 Docker Hub 类似的镜像上传系统呢?当然可以,这个统一存放镜像的系统,就叫作 Docker Registry。感兴趣的话,可以查看Docker 的官方文档,以及 Harbor 项目。
数据卷(Volume)
容器技术使用了 rootfs 机制和 Mount Namespace,构建出了一个同宿主机完全隔离开的文件系统环境。这时候,我们就需要考虑这样两个问题:
- 容器里进程新建的文件,怎么才能让宿主机获取到?
- 宿主机上的文件和目录,怎么才能让容器里的进程访问到?
这正是 Docker Volume 要解决的问题:Volume 机制,允许你将宿主机上指定的目录或者文件,挂载到容器里面进行读取和修改操作。
Docker 支持两种 volume 的声明方式,可以把宿主机中的目录挂载到容器内的指定目录中。
- docker run -v /test …:这种方式并没有显示声明宿主机目录,那么 Docker 就会默认在宿主机上创建一个临时目录 /var/lib/docker/volumes/[VOLUME_ID]/_data,然后把它挂载到容器的 /test 目录上。
- docker run -v /home:/test …:把宿主机的 /home 目录挂载到容器的 /test 目录上。
首先,启动一个 helloworld 容器,记得加上 -v 参数,表明要挂载一个数据卷。
| |
通过 docker volume 查看一下对应的 volume 信息:
| |
可以看到,挂载点在/var/lib/docker/volumes/ad20a6c12c554fa42.../_data ,和之前分析的一致。这个 _data 文件夹,就是这个容器的 Volume 在宿主机上对应的临时目录了。
或者,我们也可以通过 docker inspect container_id 来查看该容器的volume挂载信息,如下:
| |
接下来,进入容器内部并添加一个文件。
| |
然后回到宿主机,去 _data 文件价下看看发生了什么变化。
| |
可以看到,我们在宿主机上能够看到容器添加的文件。
如果在宿主机上对挂载目录下的文件进行修改,或是在挂载目录下新增/删除文件,在容器内部应该也能马上看到:
| |
再次进入容器内,可以看到,在宿主机上对文件的修改在容器内也可以看到:
| |
以上就是容器数据卷(Volume)的操作演示。
那么,Volume 背后的原理是什么呢?这一操作究竟是怎样实验的呢?
之前已经介绍过,当容器进程被创建之后,尽管开启了 Mount Namespace,但是在它执行 pivot_root(或者chroot )之前,容器进程一直可以看到宿主机上的整个文件系统。
而宿主机上的文件系统,也自然包括了我们要使用的容器镜像。这个镜像的各个层,保存在 /var/lib/docker/aufs/diff 目录下,在容器进程启动后,它们会被联合挂载在 /var/lib/docker/aufs/mnt/ 目录中,这样容器所需的 rootfs 就准备好了。
所以,我们只需要在 rootfs 准备好之后,在执行 pivot_root之前,把 Volume 指定的宿主机目录(比如 /home 目录),挂载到指定的容器目录(比如 /test 目录)在宿主机上对应的目录(即 /var/lib/docker/aufs/mnt/[可读写层 ID]/test)上(有点绕,仔细体会),这个 Volume 的挂载工作就完成了。
注意:这里提到的"容器进程",是 Docker 创建的一个容器初始化进程 (dockerinit),而不是应用进程 (ENTRYPOINT + CMD)。dockerinit 会负责完成根目录的准备、挂载设备和目录、配置 hostname 等一系列需要在容器内进行的初始化操作。最后,它通过 execv() 系统调用,让应用进程取代自己,成为容器里的 PID=1 的进程。(这部分很重要,目前还没有完全搞懂…2020/05/16)
而这里要使用到的挂载技术,就是 Linux 的绑定挂载(bind mount)机制。它的主要作用就是,允许你将一个目录或者文件,而不是整个设备,挂载到一个指定的目录上。并且,这时你在该挂载点上进行的任何操作,只是发生在被挂载的目录或者文件上,而原挂载点的内容则会被隐藏起来且不受影响。
从Linux 内核的角度来看,绑定挂载实际上是一个 inode 替换的过程。在 Linux 操作系统中,inode 可以理解为存放文件内容的“对象”,而 dentry,也叫目录项,就是访问这个 inode 所使用的“指针”。
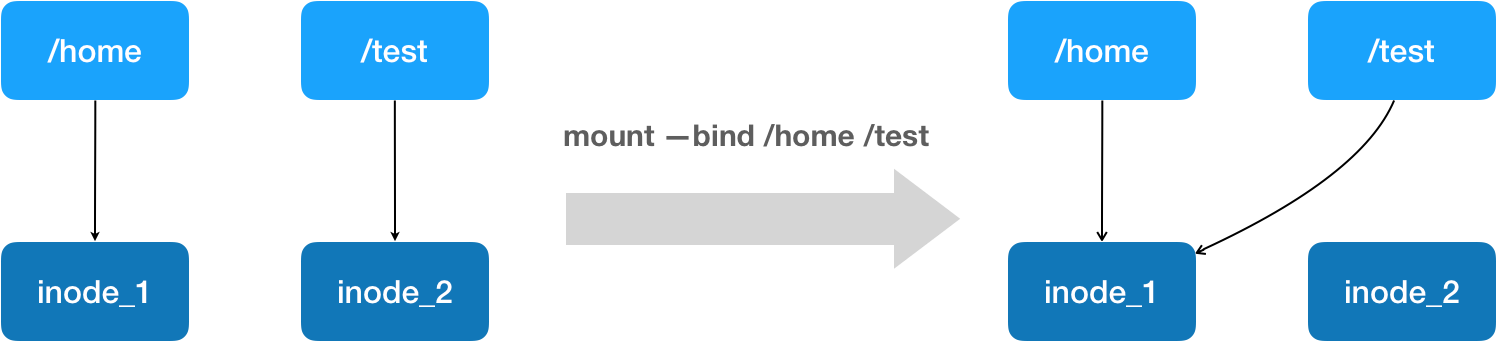
如上图所示,执行mount --bind /home /test操作,会将 /home 挂载到 /test 上。其实相当于将 /test 的 dentry,重定向到了 /home 的 inode。这样当我们修改 /test 目录时,实际修改的是 /home 目录的 inode。这也就是为何,一旦执行 umount 命令,/test 目录原先的内容就会恢复:因为修改真正发生在的,是 /home 目录里。这样,进程在容器里对这个 /test 目录进行的所有操作,都实际发生在宿主机的对应目录(比如,/home,或者 /var/lib/docker/volumes/[VOLUME_ID]/_data)里,而不会影响容器镜像的内容。